ABOUT THE LOVESHIP
AIRFRAME
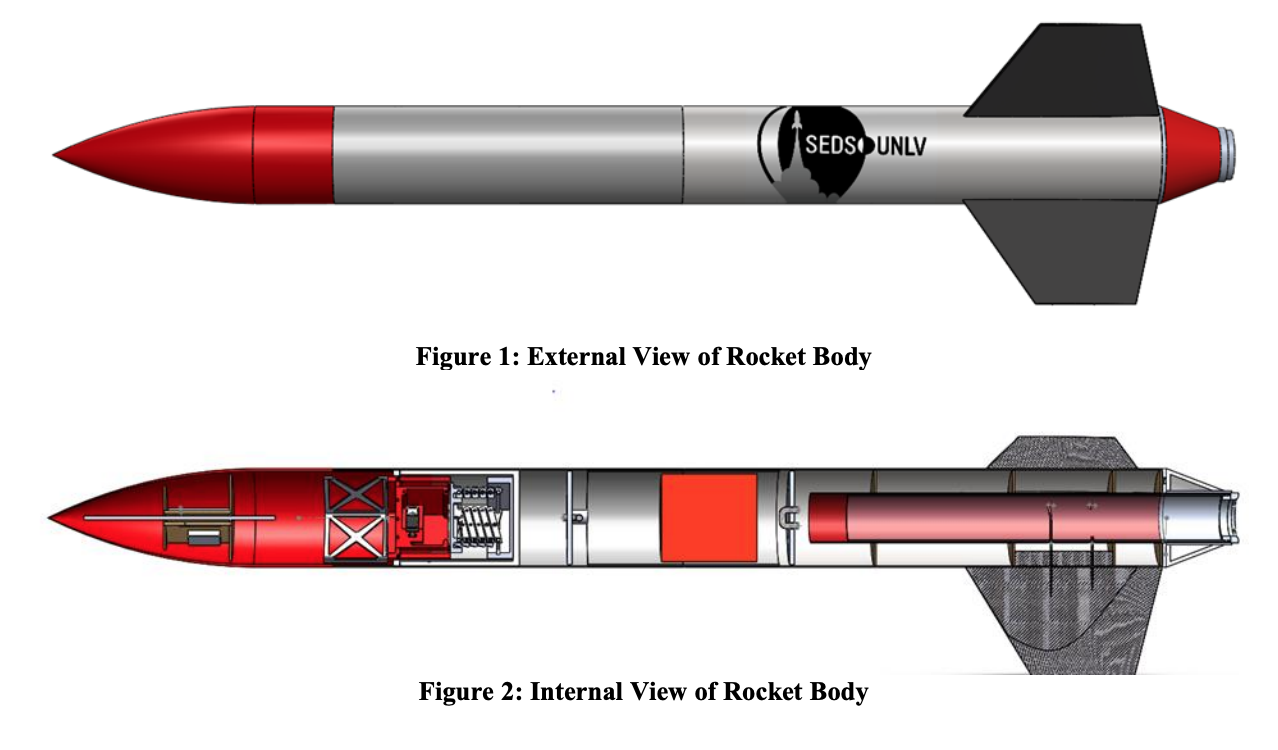
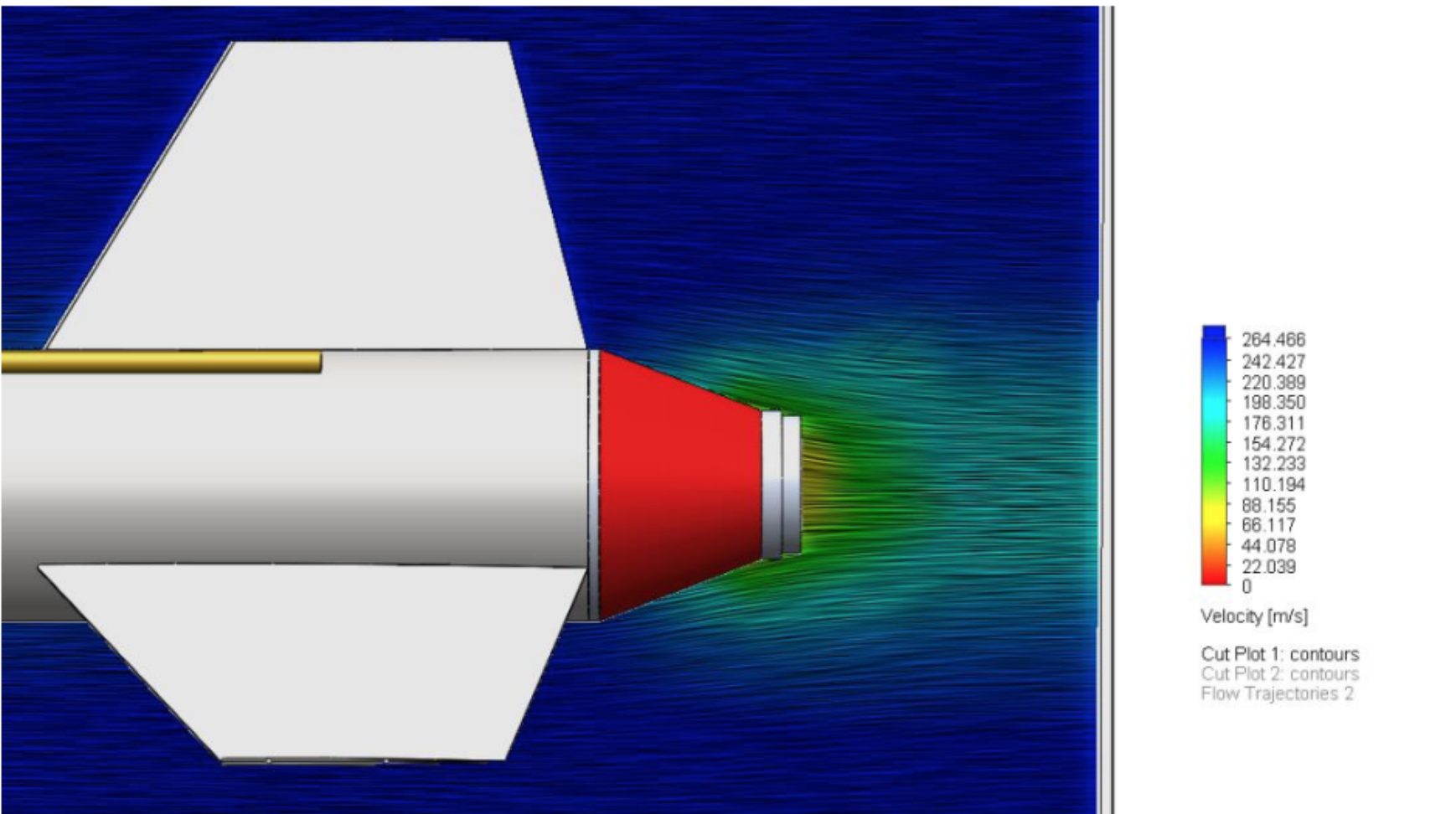
The Loveship is 6.15ft tall, featuring two fiberglass body tubes and a fiberglass nosecone. The fins were manufactured in the ship using 3D printed ABS followed by a composite layup. The boattail was also manufactured via 3D print with an aluminum tube integrated between the boattail and motor casing. Avionics is placed in the nose cone, held in place by a bulkhead.
ELECTRONICS
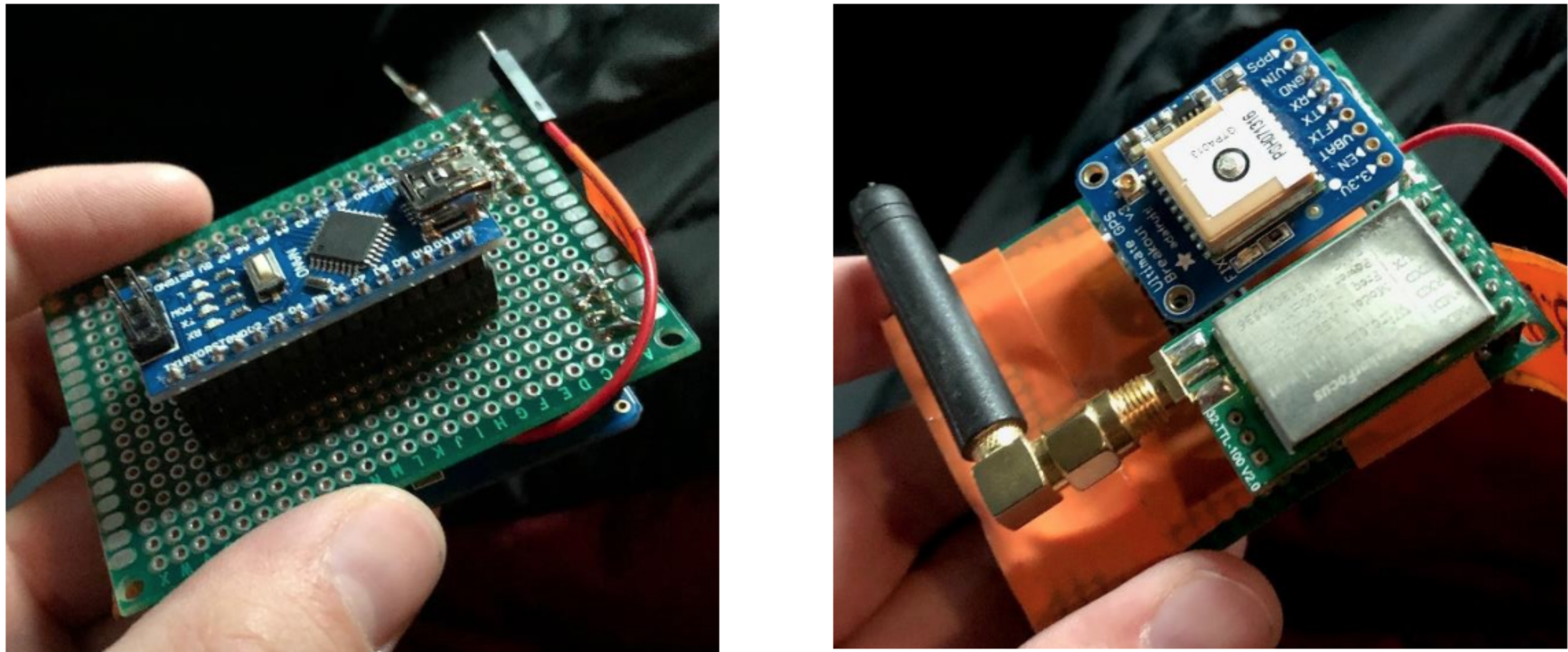
The Loveship contained an array of both commercial off-the-shelf (COTS) and student researched and developed (SRAD) electronics systems.
Most notably, it featured a SRAD GPS module and LoRa RD transmitter as well as a redundant SRAD payload control system.
Ejection and recovery were based on redundant COTS altimeters with real-time flight data functionality.
Code for telemetry analysis and payload control was written in C++ and Python
PROPULSION
After many simulations, the L1115 solid rocket motor made by Cesaroni Technology was chosen. The L1115 is a reloadable 4 grain, 24.45in length by 75 mm diameter motor. It has a total impulse of 4908.732 Ns with an average thrust of 1093.259 N and a burn time of 4.49 seconds. The rocket is set to reach approximately 9,500 ft weighing 38.5 lbs.
PAYLOAD
The payload flying upon this rocket featured a model self-inflating habitat to be used for the colonization of new lands. The payload subsystem is comprised of three, functional, cube-sat sized payloads.
CUBE 1
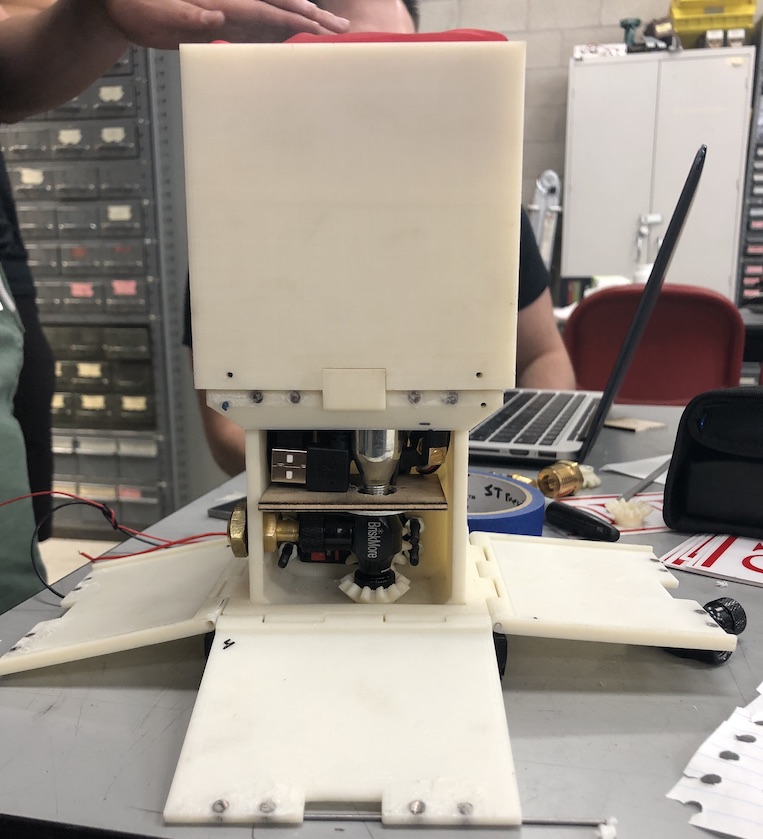
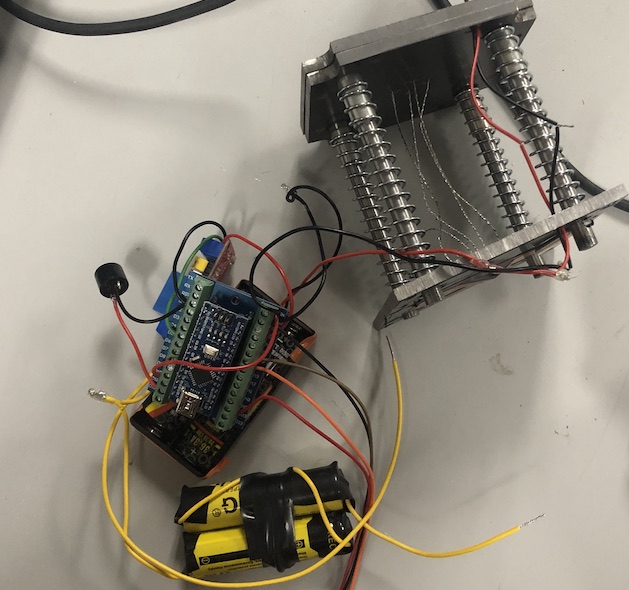
Cube 1 housed the inflation mechanism used to expand the module with compressed CO2 after touchdown.
CUBE 2
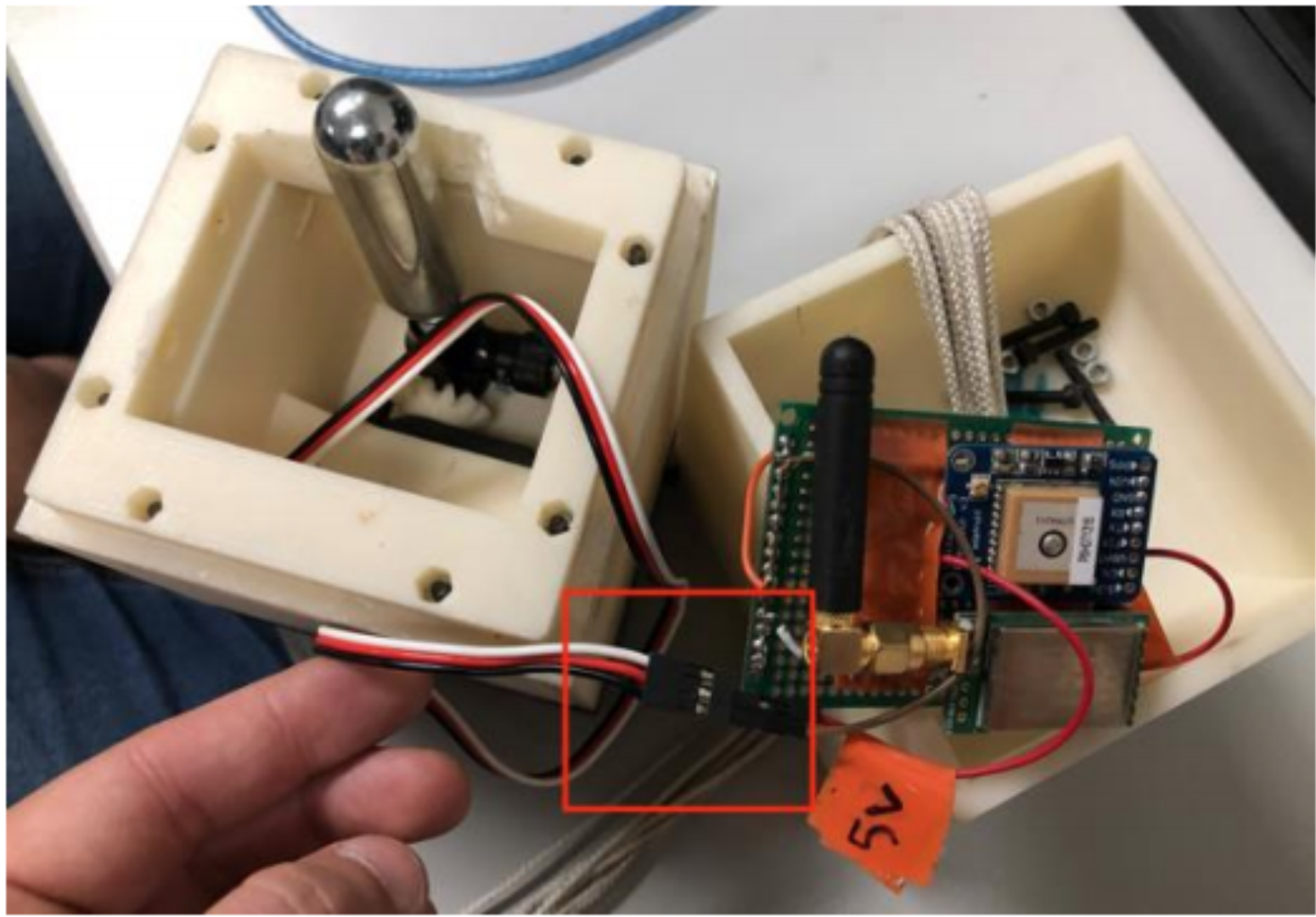
Cube 2 housed the electronic components that were required for tracking the payload and also determining when Cube 1 is able to deploy the compressed CO2
CUBE 3
Cube 3 featured the ejection mechanism which deployed the mated cubes 1 and 2 at the appropriate altitude.
Video Summarizing Team's Trip to Spaceport America
QUICK FLIGHT STATS
Maximum Altitude
8200 ft
Maximum Velocity
0.724 mach
Flight Time
218.55 secs
Final Standing
26th out of 107 overall
12th out of 50 10K COTS
PHOTOS